Vývojom novej bezpečnostnej funkcie, ktorá vyhľadáva únikové cesty bez rizika zrážky, urobila spoločnosť Volvo Cars posledný krok k uskutočneniu svojej vízie, aby od roku 2020 nikto nezahynul ani sa vážne nezranil v novom vozidle Volvo.
V decembri sa uzavrie štvorročný projekt s názvom Non-Hit Car and Truck (osobné a nákladné vozidlá bez nehody), ktorého najvyšším úspechom je vývoj novej generácie technológií senzorickej fúzie poskytujúcich neprerušovaný 360-stupňový pohľad na okolie vozidla.
Švédsky projekt Non-Hit Car and Truck, prebiehajúci v rámci spolupráce akademickej obce, viacerých inštitúcií a priemyselných podnikov, sa zameriaval na vývoj nových a zdokonalenie existujúcich technológií v záujme znižovania rizika nehôd osobných aj úžitkových vozidiel.
Bezkonkurenčný 360-stupňový pohľad na okolie vozidla – senzorická fúzia
Jednou z výziev projektu bolo vytvoriť z množstva senzorov nenápadne rozmiestnených po obvode vozidla súdržný detekčný systém, čo sa doteraz ešte nikomu nepodarilo. Tento cieľ vyžadoval vývoj centralizovaného rámca, ktorý by na základe senzorickej fúzie umožňoval viacerých technológiám – kamerám, radarom, lidarom, GPS atď. – efektívne vzájomné využívanie informácií.
Prostredníctvom tohto rámca dokáže systém poskytnúť kompletný 360–stupňový pohľad na okolie a zaznamenať každý predmet predstavujúci potenciálne riziko, ktorý by vodiči inak nemohli vidieť. Vďaka zameraniu na životaschopné automobilové senzory prispel tento projekt významnou mierou k tomu, aby sa táto nová technológia stala realitou už v blízkej budúcnosti.

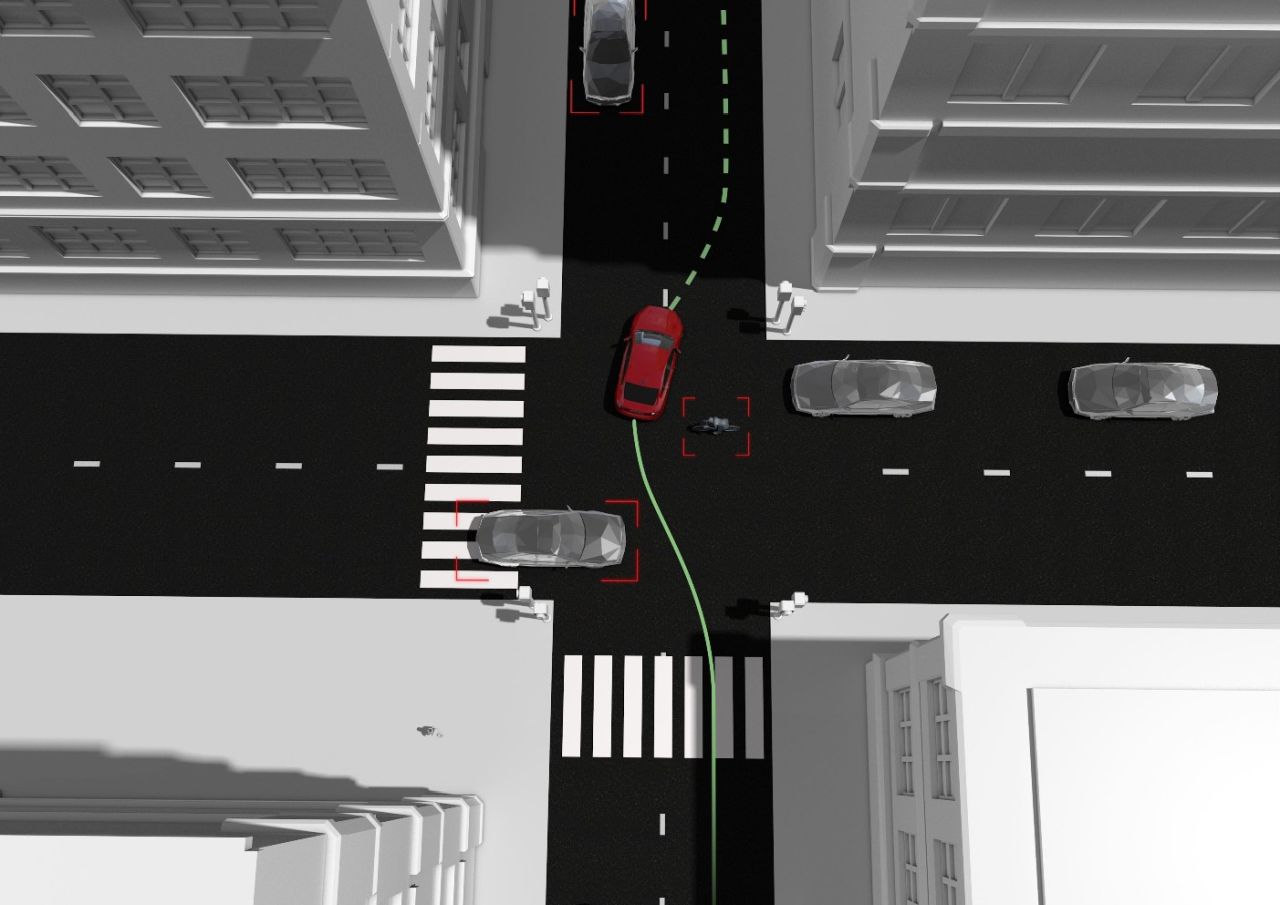
Generovanie únikových ciest bez rizika zrážky – vyhodnocovanie rizík
Ďalším vylepšením 360-stupňového zobrazenia je nová bezpečnostná funkcia generovania jazdných manévrov, ktorá vo všetkých dopravných situáciách pomocou softvéru vyhľadáva únikové cesty bez rizika zrážky. Tento systém neustále analyzuje hroziace nebezpečenstvo v okolí vozidla a dokáže vodičom pomôcť dokonca aj automatickým brzdením a zásahmi do riadenia. V rámci projektu boli skonštruované dve testovacie vozidlá, ktoré poslúžia na predvedenie vzájomnej spolupráce 360-stupňového zobrazenia a generátora jazdných manévrov.

Medzníkový rok 2020 a samostatne jazdiace vozidlá
„Na poli výskumu a vývoja systémov aktívnej bezpečnosti stojí spoločnosť Volvo Cars jednoznačne v prvej línii. A vďaka projektu Non-Hit Car and Truck sme urobili významný krok smerom k uskutočneniu našej vízie, aby od roku 2020 nikto nezahynul ani sa vážne nezranil v novom vozidle Volvo. Táto technológia má rozhodujúci význam aj pre vývoj samostatne jazdiacich vozidiel, ktoré dokážu automaticky ovládať riadenie a brzdiť s cieľom zabrániť zrážke s akýmkoľvek predmetom v akejkoľvek situácii. Naším hlavným cieľom je zamerať sa na predchádzanie rôznym typom situácií, pri ktorých dochádza k nehodám. V rámci ďalšieho napredovania budeme pokračovať vo vývoji vozidiel, ktoré sa prispôsobia jedinečnému správaniu každého vodiča,“ povedal Anders Almevad, manažér projektu Non-Hit Car v spoločnosti Volvo Cars.
Projekt Non-Hit Car and Truck (osobné a nákladné vozidlá bez nehody)
Iniciatívny projekt Non-Hit Car and Truck v hodnote 80 miliónov švédskych korún spustila spoločnosť Volvo Cars spolu s partnermi v septembri 2010 a ukončí sa v decembri 2014. Podporuje víziu spoločnosti Volvo Cars, aby od roku 2020 nikto nezahynul ani sa vážne nezranil v novom vozidle Volvo. Hlavným zameraním projektu bol vývoj technológií na znižovanie rizika nehôd osobných a úžitkových vozidiel. Zúčastnení partneri: Volvo Cars, AB Volvo, ÅF (vývoj senzorickej fúzie), HiQ (vývoj senzorickej fúzie, vyhodnocovanie rizík), Mecel (dodávateľ senzorov) a Chalmers (vývoj senzorickej fúzie, prispôsobenie vodičovi). Projekt Non-hit Car and Truck je spojený s centrom SAFER pre výskum automobilovej a dopravnej bezpečnosti.
Zdroj+foto: Volvo